

Nos dias de hoje é cada vez mais comum a criação de robots que consigam executar tarefas repetidamente e com eficiência. O enquadramento deste projeto prende-se com a inclusão de som em robots, no sentido de influenciar a sua locomoção através de sons. Assim, este projeto de cariz académico tem como objetivo desafiar os alunos no sentido de desenvolverem soluções robóticas que interajam com os humanos encontrando pontos de convergência tecnológica e novos paradigmas, com recursos relativamente baixos e contemplando soluções modulares e open source.
Introdução
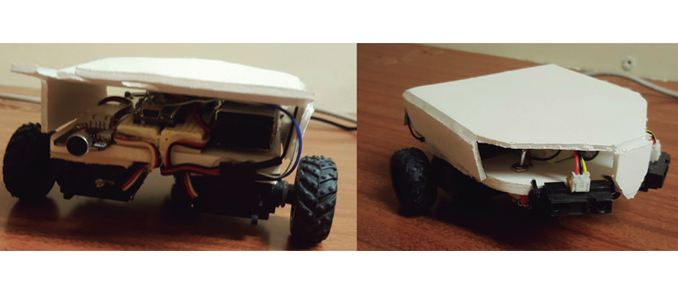
O artigo aborda o desenvolvimento de um robot com 2 tipos de controlo, um através de som (palmas) e outro, mais comum, através de 2 sensores de infravermelhos. Este projeto foi realizado no curso de Técnico Eletrónica, Automação e Comando do INETE [1]. Um dos grandes objetivos do projeto consiste na tradução do som do bater de palmas para instruções de controlo e consequente locomoção do robot. O outro grande objetivo é o robot ser de tamanho reduzido e de baixo consumo.
Assim, o robot desenvolvido possui 2 modos de funcionamento: modo autónomo e modo manual. No modo autónomo a sua locomoção está dependente, exclusivamente dos 2 sensores de infravermelhos, permitindo uma deslocação da seguinte forma: frente, trás, esquerda, direita e parado. No modo manual, o robot é controlado em função de sons (tons) existentes no seu meio envolvente, no caso que se está a explorar através de palmas.
Luís Pires
INETE – Instituto de Educação Técnica
Para ler o artigo completo faça a subscrição da revista e obtenha gratuitamente o link de download da revista “robótica” nº115. Pode também solicitar apenas este artigo através do email: [email protected]

Outros artigos relacionados
- Artigo “Omnidirectional Robot using Internet of Things (IoT)” da edição 108 da revista “robótica”;
- Artigo “Braço/mão robótica controlado remotamente através de sensores flexíveis” da edição 105 da revista “robótica”;
- Artigo “Robot para Busca e Salvamento baseado na Plataforma Raspberry PI 2” da edição 102 da revista “robótica”;
- Artigo “MyBot: Cloud-Based Service Robot using Service-Oriented Architecture” da edição 107 da revista “robótica”;
- Artigo “Robot Bípede” da edição 107 da revista “robótica”;
VOCÊ PODE GOSTAR
-
Strategies to Reduce Power Consumption in pico-Satellites
-
Unusual Robotic Arm [Braço robótico incomum]
-
Extending I/O Interfaces for Phoenix Contact PLC using ESP-NOW wireless microcontrollers
-
Neptune.Controller: smart system for water assisted injection moulding based on fluid flow and heat transfer
-
Robot colaborativo em tarefas de polimento